







Fundamentos de la "clasificación" en teledetección
Jueves, 14 de Noviembre de 2013 08:44

 El mundo de la teledetección, es quizás una de las áreas del conocimiento, de la cual podemos tomar interesantes conceptos y técnicas para nuestros trabajos de documentación gráfica del patrimonio, o cuando menos tenerlos presentes para conocer el potencial de ciertas técnicas.
El mundo de la teledetección, es quizás una de las áreas del conocimiento, de la cual podemos tomar interesantes conceptos y técnicas para nuestros trabajos de documentación gráfica del patrimonio, o cuando menos tenerlos presentes para conocer el potencial de ciertas técnicas.
La teledetección es una disciplina que utiliza múltiples sensores para obtener información remota de un objeto o escena. Entre dichos instrumentos, la imagen digital suele ser una de las habituales. Sin embargo, a diferencia de la fotografía digital común, se utilizan cámaras capaces de de “ver” más allá del espectro visible, como en infrarrojo o el ultravioleta, con el fin de obtener la máxima información posible de una escena.
Mientras que una cámara normal, fotografía en tres bandas en el espectro visible, o lo que es lo mismo en tres canales: R, G y B, en la imagen multibanda o multiespectral, una escena es capturada en múltiples bandas, que van desde el espectro visible a invisible (IR y UV).
Cada canal o banda de estas imágenes puede ser mostrado en una imagen en escala de grises o densidades, donde cada pixel se corresponde un nivel de “intensidad”.
Esta pila, o conjunto de canales o capas, se denomina en ciertos argots “hipercubo”, donde cada pixel esta descrito por las habituales coordenadas X e Y, además de una Z, descrita por la intensidad de dicho pixel en los diferentes canales.
El siguiente paso es determinar cual es la probabilidad que un pixel, o conjunto de pixeles, se corresponda con una determinada característica de nuestra escena (un elemento o compuesto). Para ello tenemos que correlacionar la intensidad de un determinado conjunto de pixeles, con la “firma espectral” del compuesto a detectar.
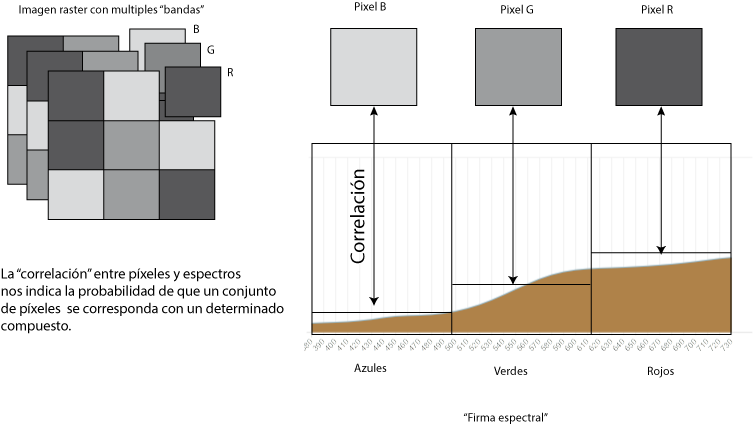 Una “firma espectral” es una curva, creada a partir de la radiancia (energía reflejada) por cada longitud de onda a lo largo del espectro. De esta forma una superficie, reflejará más o menos energía en determinadas zonas del espectro, fenómeno por cual percibimos los diferentes colores. Para obtener una “firma espectral” de un compuesto o superficie, necesitamos un espectroradiómetro, o en su defecto espectrofotómetro, el cual nos arrojará el espectro en forma de una curva formada por tantos puntos como bandas sea capaz de resolver dicho dispositivo.
Una “firma espectral” es una curva, creada a partir de la radiancia (energía reflejada) por cada longitud de onda a lo largo del espectro. De esta forma una superficie, reflejará más o menos energía en determinadas zonas del espectro, fenómeno por cual percibimos los diferentes colores. Para obtener una “firma espectral” de un compuesto o superficie, necesitamos un espectroradiómetro, o en su defecto espectrofotómetro, el cual nos arrojará el espectro en forma de una curva formada por tantos puntos como bandas sea capaz de resolver dicho dispositivo.
De esta forma un pixel tiene más o menos niveles (0-255) dependiendo de la energía reflejada por una superficie, para una banda en particular. Así una superficie percibida como “roja” indicará que refleja mucha energía en la región del espectro comprendida entre los 600-700nm, por lo que el pixel resultante tendrá un “nivel de pixel” elevado, mientras que los pixeles de las bandas verdes y azules, tendrán niveles bajos.
Así podemos correlacionar las intensidades de los pixeles con las curvas o firmas espectrales, y en cuantas más bandas seamos capaces de separar nuestra escena, más precisión obtendremos para correlacionarla con una determinada curva.
Hay que prestar atención que muchas de las técnicas de correlación usadas, son mera estadística, por lo que estas clasificaciones, no representan más que la probabilidad para que un conjunto de pixeles, representen uno u otro elemento de la escena.
Un poco de práctica
 Si queremos jugar un poco con estos conceptos podemos recurrir a la herramienta gratuita multiplataforma Hypercube de la US Army, que además nos permite descargar algunas imágenes de prueba y una pequeña biblioteca de firmas espectrales.
Si queremos jugar un poco con estos conceptos podemos recurrir a la herramienta gratuita multiplataforma Hypercube de la US Army, que además nos permite descargar algunas imágenes de prueba y una pequeña biblioteca de firmas espectrales.
Pero también podemos trabajar con imágenes RGB comunes.
Si usamos una imagen RGB, tras abrirla, la tenemos que convertir en un hipercubo, para ello acudimos a “Image > Convert Image > Color to Cube” y elegimos por ejemplo el modo BGR Cube.
A continuación veremos como nuestra imagen se descompone en canales donde solo está expresada la densidad, de esta forma en la parte superior veremos que al canal rojo se asigna entorno a los 646nm, el verde a los 545nm y el azul para los 460nm.
A continuación ya podemos realizar una “clasificación” para ello vamos a “Functions > Classify”. En este punto podemos hacer clasificaciones detectando los píxeles con niveles parecidos, para ello debemos aplicar varios puntos sobre las zonas de interés, para realizar el “entrenamiento” y luego clasificar.
Sin embargo, al hilo de lo comentado, lo mejor es cargar una “librería” de firmas espectrales. Estas firmas podrán ser por ejemplo tipos de suelos, asfalto, agua, arena, vegetación, etc,... o tipos de pigmentos, etc. Si nos descargamos la firmas de prueba, podemos ver el formato de las mismas, donde por ejemplo el archivo Alib, es el índice, y el resto las firmas. Una firma posee una cabecera donde entre diversos ceros, podemos ver el intervalo del espectro, por ejemplo 350-2500nm y los pasos, por ejemplo 5nm. Si usamos un espectrofotómetro de artes gráficas, por ejemplo será de 380-730 en pasos de 10nm.
Otra configuración con la que podemos jugar es el método de comparación o correlación que vamos a usar, por defecto suele aparecer “Vector Angle” que es uno de los más habituales.
Con estos paso más o menos claros ya podemos seleccionar que firmas queremos detectar en nuestra escena, si queremos hacer promedios con las mismas, etc,...
| < Prev | Próximo > |
|---|


